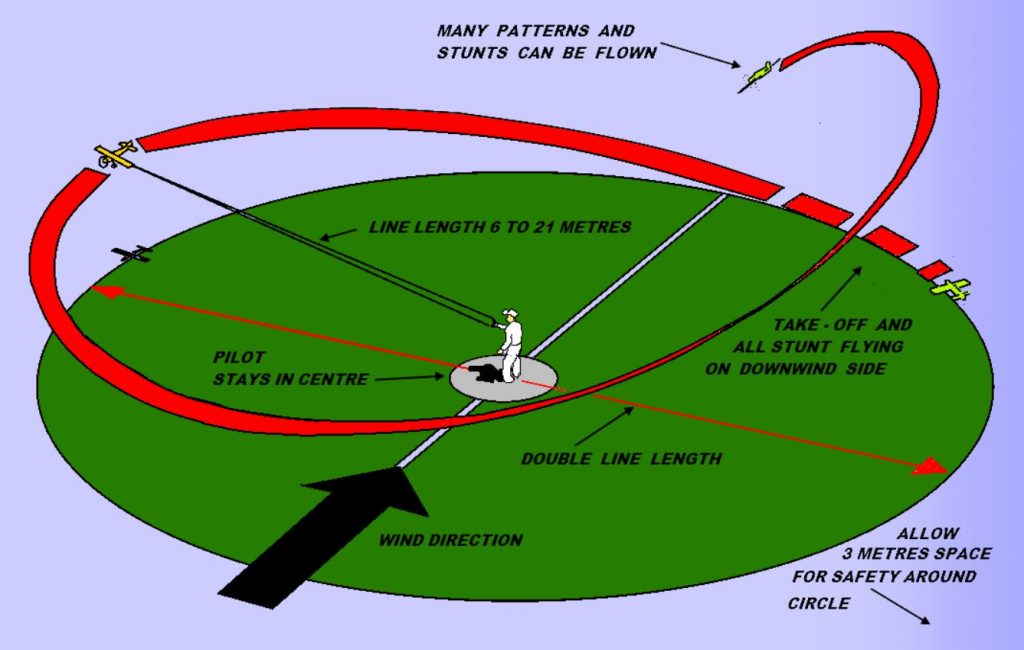
El vuelo circular es una disciplina del aeromodelismo en la que el modelo no vuela físicamente de una manera libre.
El modelo y el piloto están unidos durante todo el vuelo mediante un par de cables muy finos, que sirven para accionar el mando que hace que el aeromodelo pueda subir o bajar a voluntad.
El piloto tiene en su mano un mando en forma de «C» que se llama manija al que se unen los dos cables de mando, cuyo extremo opuesto está unido a una actuador mecánico en forma de «T», que hace que el timón de profundidad del estabilizador del modelo pueda subir o bajar.
Es sencillo, si movemos la manija hacia arriba el modelo sube, y si la movemos hacia abajo, pues baja.
El modelo vuela en círculos alrededor del piloto, que acompaña su movimiento.
Ya hace tiempo que el vuelo circular, al igual que las demás disciplinas de aeromodelismo, ha ido derivando hacia el uso de motores eléctricos.
Como en cualquier otro aeromodelo, en los de vuelo circular se usan motores brushless con un regulador o ESC y un paquete de baterías LIPO.
La particularidad que tiene el vuelo circular es que el control de profundidad se sigue haciendo mecánicamente mediante los dos cables de mando y la manija.
En general hay dos formas de disponer el modelo en vuelo, mediante un controlador que marca un tiempo determinado de vuelo o TIMER, o bien mediante un dispositivo que regule directamente el control de aceleración del motor de alguna forma.
La manera más sencilla es el uso del TIMER. Existen varios modelos más o menos complejos, que regulan la duración del vuelo, el régimen de revoluciones del motor y la compensación de la caída de revoluciones que sucede conforme la batería se descarga y cae su voltaje.
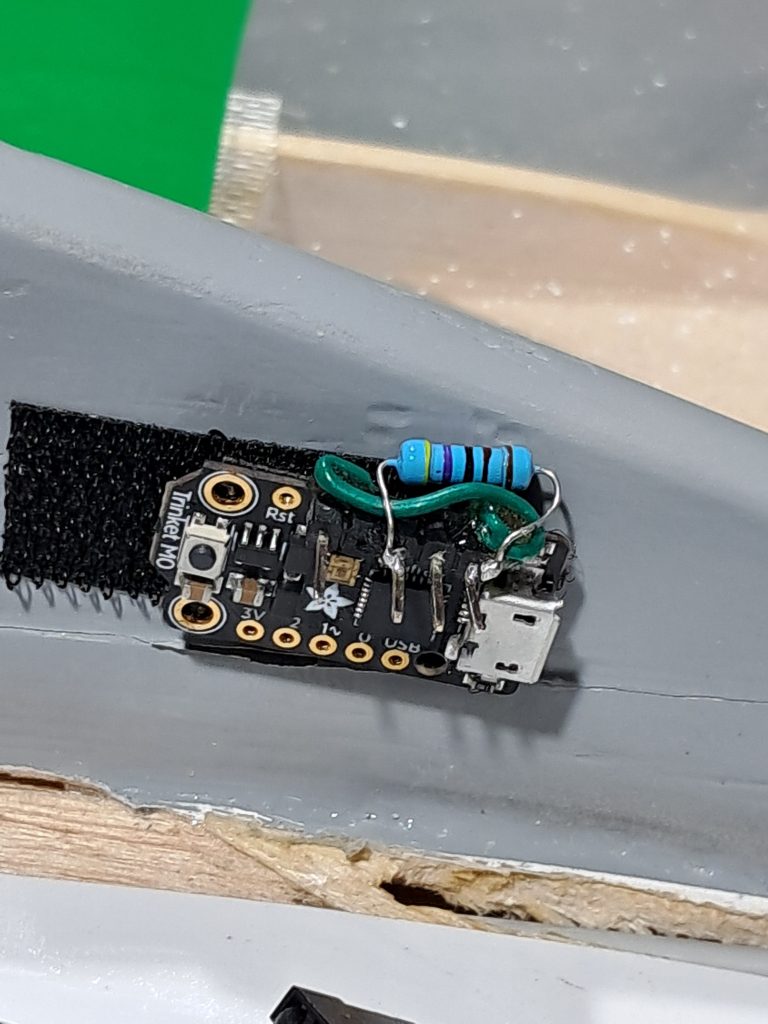
Yo he usado un TIMER muy sencillo y que funciona francamente bien llamado TOUCH AND GO, es de montaje propio a partir de una plaquita electrónica programable. Las instrucciones de montaje, el programa y la configuración se pueden descargar en circuitflyer.com
Si, por el contrario, nos decantamos por el control de las revoluciones del motor a voluntad de una forma parecida a como se hace en radio control, pues también existen varios modos de hacerlo, desde añadiendo cables de mando extra, con sistemas de T de mando más o menos complejos, hasta usar cables aislados para enviar órdenes a través de ellos o, simplemente, via radio.
Desde 2023 la Federación Aeronáutica Internacional (FAI), permite el uso de mandos de radio control de 2.4GHZ para controlar las acciones secundarias del modelo, como son las revoluciones del motor, la recogida y extensión del tren de aterrizaje, o el uso de flaps.
Yo, después de haber probado todo tipo de dispositivos al efecto, he terminado por decantarme por el uso de un equipo de radio control modificado que llevo anclado en un cinturón mientras vuelo. Más adelante publicaré una entrada explicando las modificaciones que hago.
F4b es la denominación que da la Federación Aeronáutica Internacional (FAI), a las maquetas de vuelo circular.
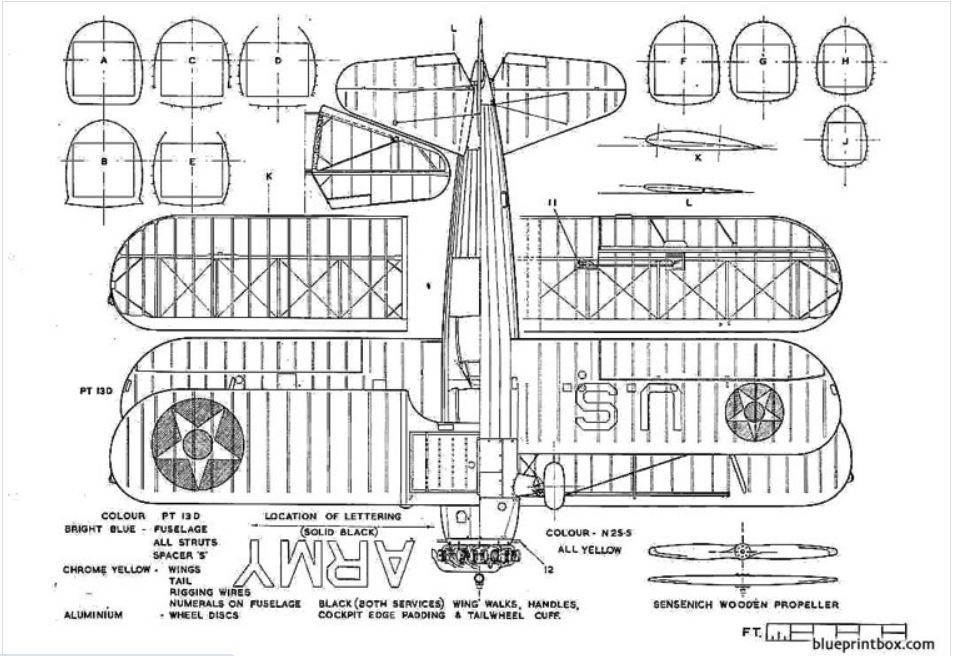
Una maqueta es un aeromodelo a escala reducida de un avión real. Las maquetas responden a las dimensiones reales de un avión, que se obtienen a partir de un plano a escala a 3 vistas. Con ese plano y con fotografías del avión real construimos una reproducción a escala reducida que se corresponde con la mayor fidelidad posible con el modelo real.
F4b es la designación de las competiciones de vuelo circular que se realizan sobre esta disciplina, en las que se valora tanto la fidelidad de escala, como la terminación del modelo y su vuelo, que debe ser lo más parecido posible al del avión real.
Empezamos con esta entrada una serie de artículos destinados a la fabricación de un mando adaptado para el control de las funciones secundarias de los modelos de vuelo circular.
Como se comentó en otro artículo la Federación Aeronáutica Internacional hace varios años que permite el uso de aparatos de radio control para las funciones secundarias. La función primaria, el control del timón de profundidad, se sigue haciendo de manera clásica a través de los cables de vuelo, y luego tenemos otras funciones ( control de motor, tren de aterrizaje retráctil, flaps……..), que se hacen mediante control por radio.
Tras haber probado prácticamente todas las maneras de control que han ido surgiendo durante los años de mi trayectoria como modelista en vuelo circular, al final he llegado al equipo que voy a describir, que consiste en un equipo RC de bajo coste adaptado para que quede suspendido de un cinturón.
Las ventajas que, para mí, tiene este método con respecto a otros son las siguientes:
Puedes seguir usando tus cables de vuelo normales.
Puedes usar una manija normal.
Tu mano natural de vuelo está totalmente libre y no se ve afectada por el accionamiento de los mandos con la otra.
El ajuste del acelerador del motor mediante stick es muy fino y está más que probado. Es mucho más cómodo que si tienes que accionar un gatillo con el dedo de la misma mano de control de vuelo.
Es muy barato, muy fiable y muy fácil de modificar.
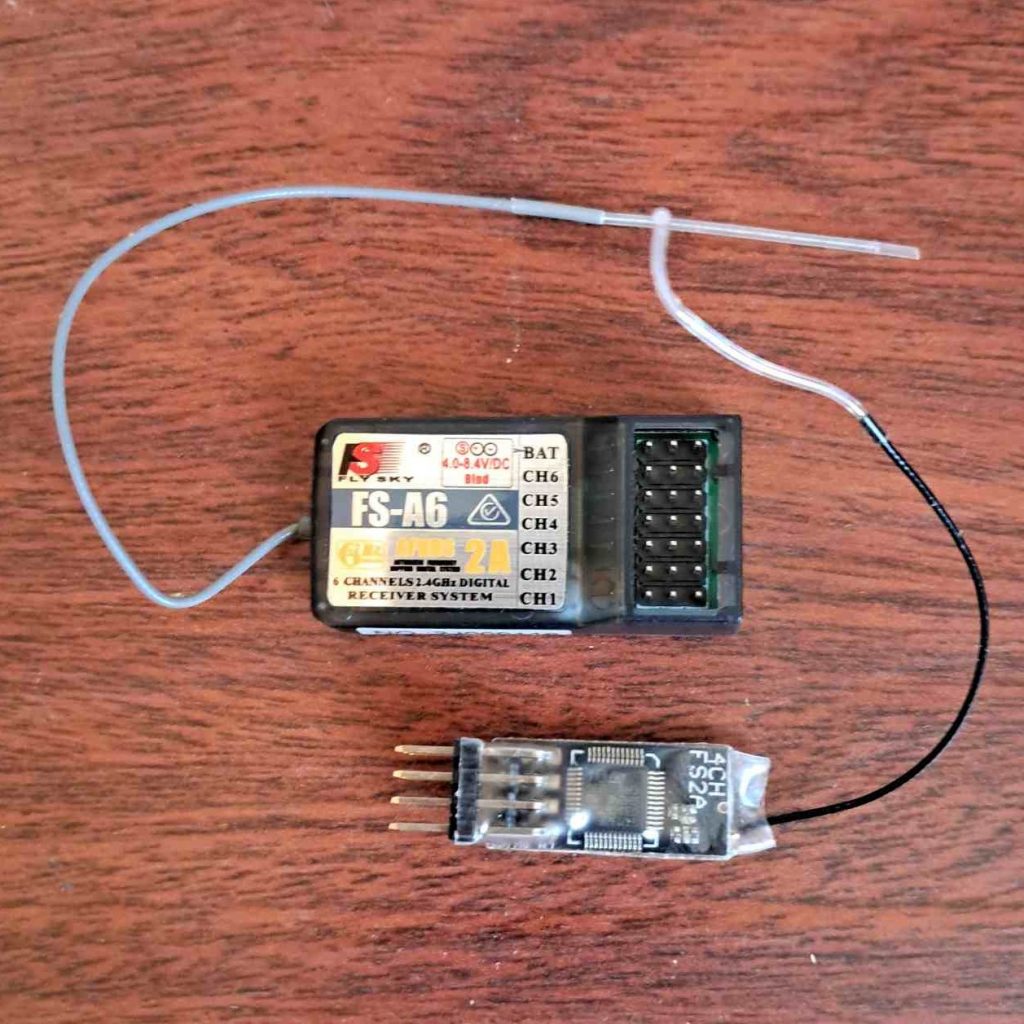
La base del sistema es un equipo de radio control de tipo Parkfly de la marca Flysky, concretamente el FS i4 de 4 canales. Este conjunto viene con un receptor de 6 canales muy pequeño, y puede adquirirse otro receptor compatible de cuatro canales que pesa apenas un par de gramos. Estos artículos se pueden conseguir en Aliexpress por un importe bastante bajo.
Con las modificaciones que realizaremos, y que se irán detallando en sucesivos capítulos, eliminaremos el stick del lado derecho y modificaremos el del lado izquierdo para que solo sea funcional el mando de gases, añadiremos dos interruptores con función todo o nada y un potenciómetro para un canal proporcional.
El stick controlará el mando de gases, tendremos uno de los interruptores para accionar un tren retráctil y el potenciómetro para los flaps. El interruptor que queda puede usarse para una acción alternativa, como el lanzamiento de bombas, el movimiento de una torreta, la apertura de la cabina, u otra que se nos ocurra. Usar más de tres acciones aparte del control de los gases es raro y puede convertirse en un verdadero lío. Con este equipo será más que suficiente en la práctica totalidad de los casos.
Al conjunto se le añadirá un encastre trasero en forma de clip, que se anclará a voluntad en un soporte que se colocará en el cinturón.Tanto el clip del transmisor como el soporte del cinturón se podrán fabricar en una impresora 3D.
Al final de esta serie de artículos dejaré un enlace para descargar los archivos de impresión. Estas piezas se pueden encargar en un montón de sitios si no disponemos de este tipo de impresora.
En esta segunda parte del tutorial para la modificación del equipo de radio nos centraremos en eliminar todos los componentes de fábrica que no necesitaremos.
En primer lugar abriremos el emisor retirando los cuatro tornillos de anclaje de su parte posterior.
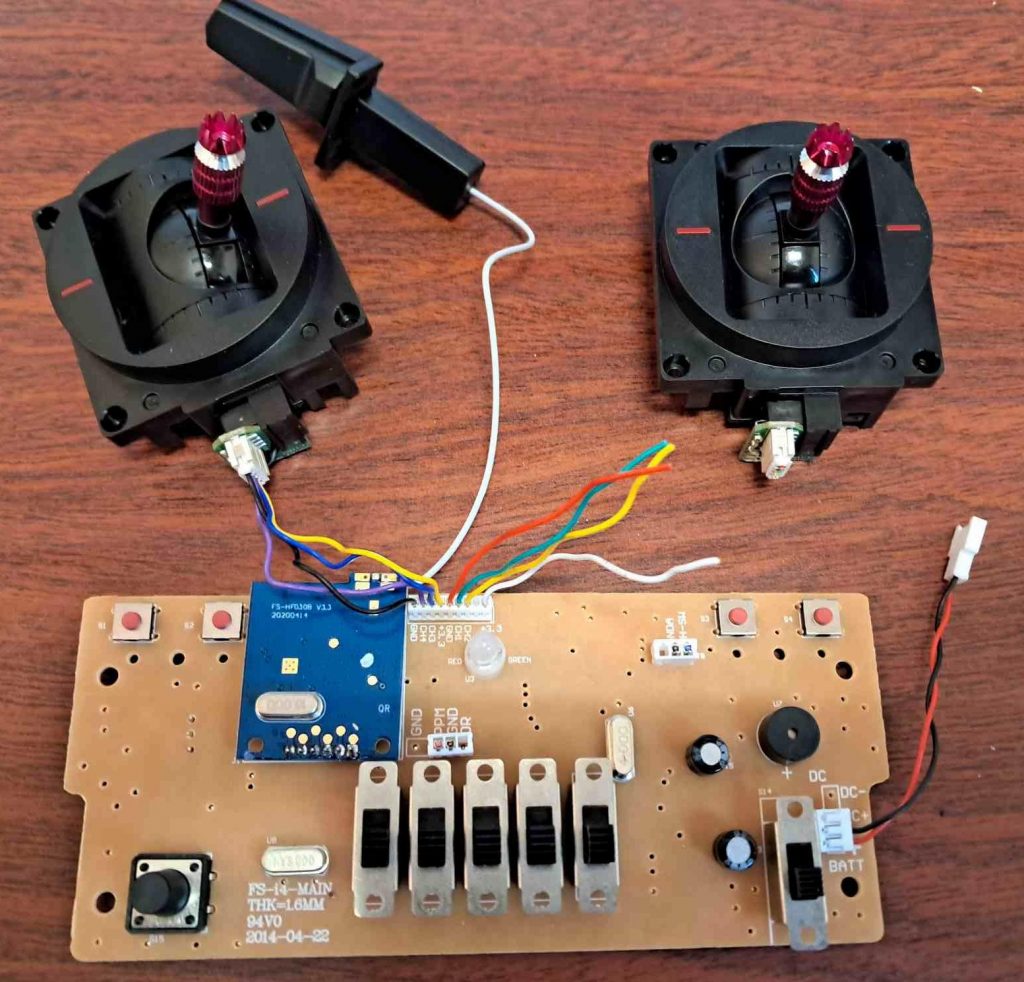
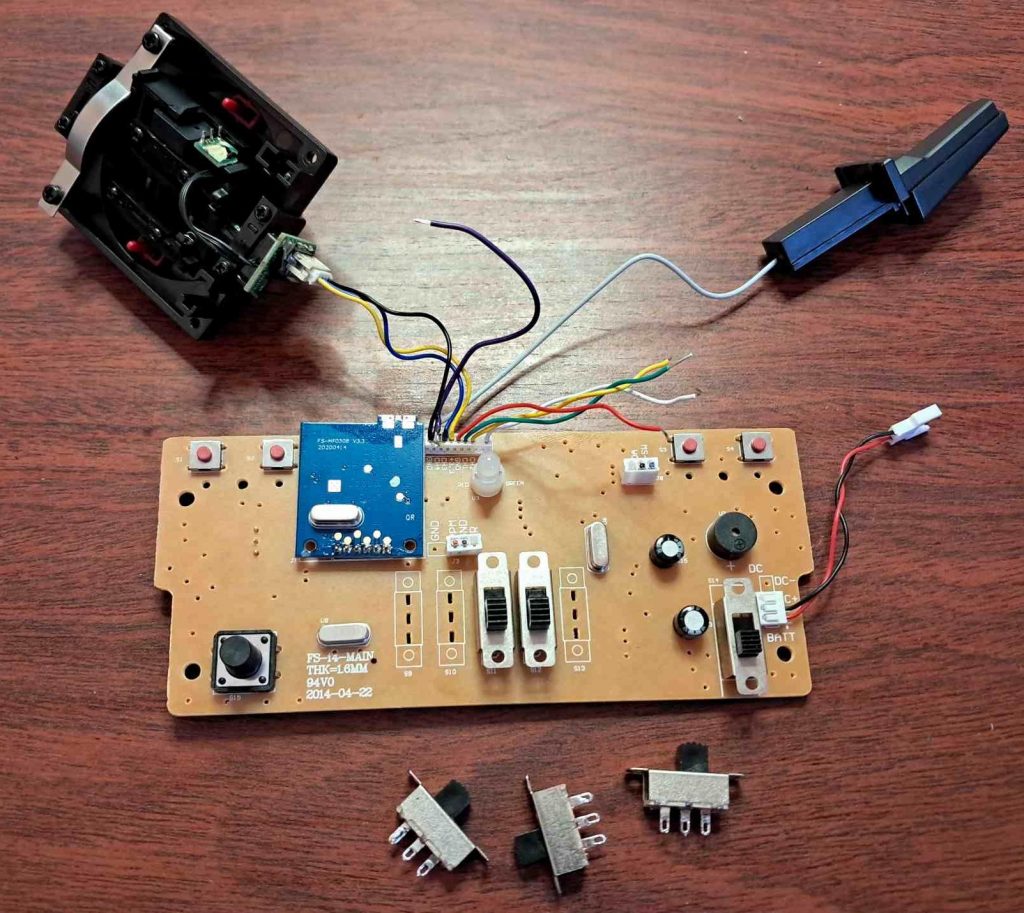
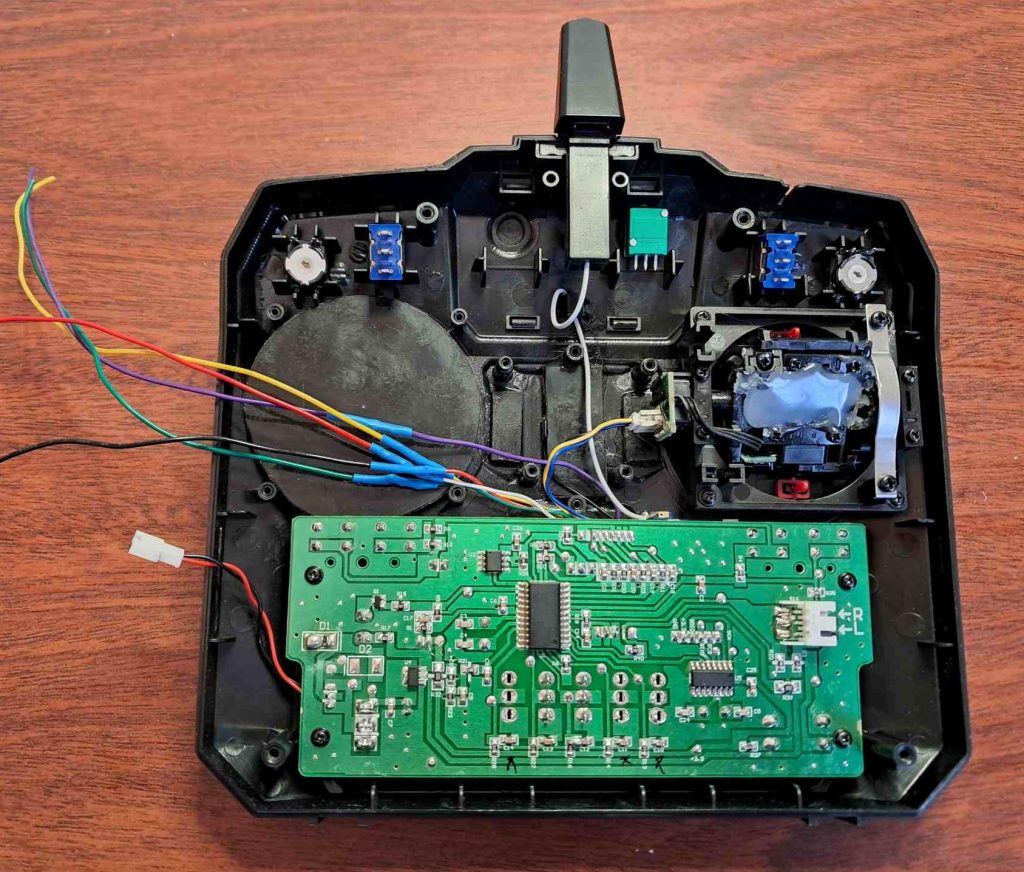
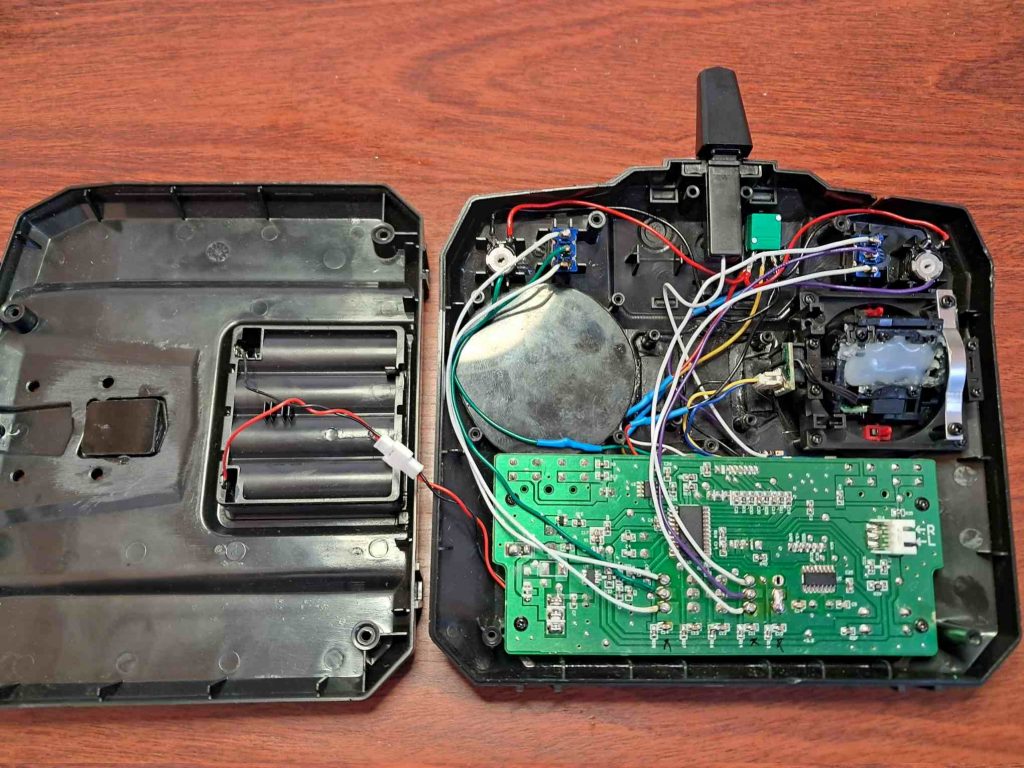
Una vez retirados los tornillos de anclaje nos encontraremos con las dos carcasas con todos los componentes montados en su sitio.
Como puede apreciarse, hemos desconectado la placa de la conexión a un PC que se encuentra en la carcasa trasera (en el lado izquierdo de la imagen) y también la conexión de las baterías.
Vamos a eliminar la placa de conexión a PC, todos los trims, el stick del lado derecho (alerones y profundidad) completo y el anclaje del arnés para colgarse el equipo.
En primer lugar desmontamos la placa de la conexión a PC quitando sus dos tornillos de anclaje.
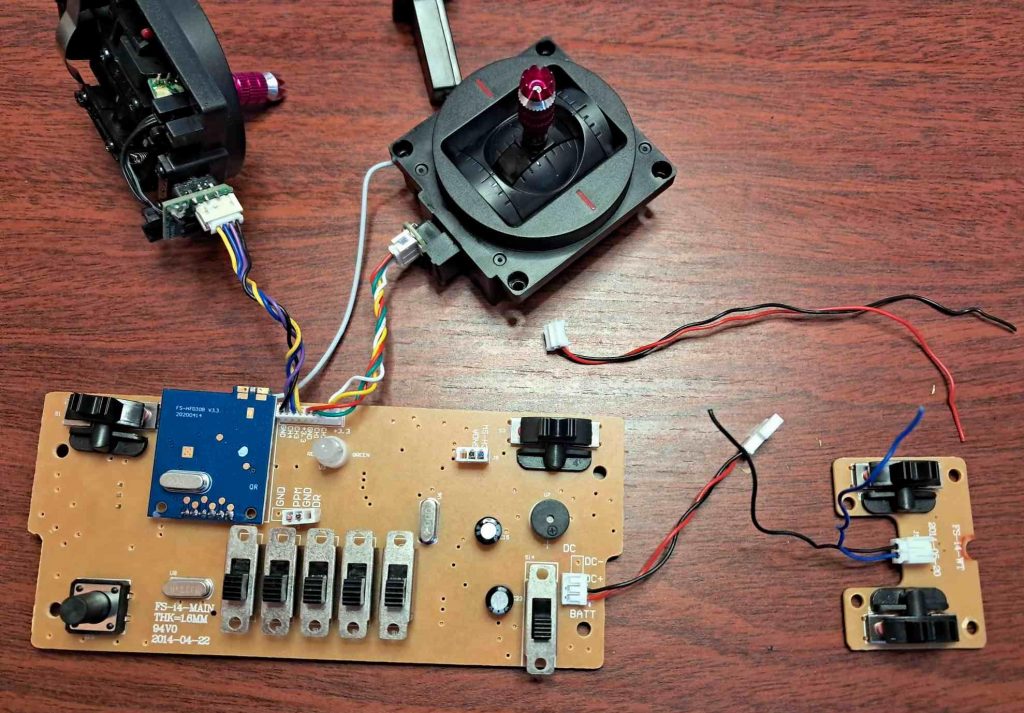
En segundo lugar desmontaremos las placas de la carcasa frontal del equipo y los sticks.
Ahora eliminaremos el conector de conexión a PC y el de la placa central de trims.
Como puede apreciarse hemos cortador los cables a ras del conector soldado en la placa.
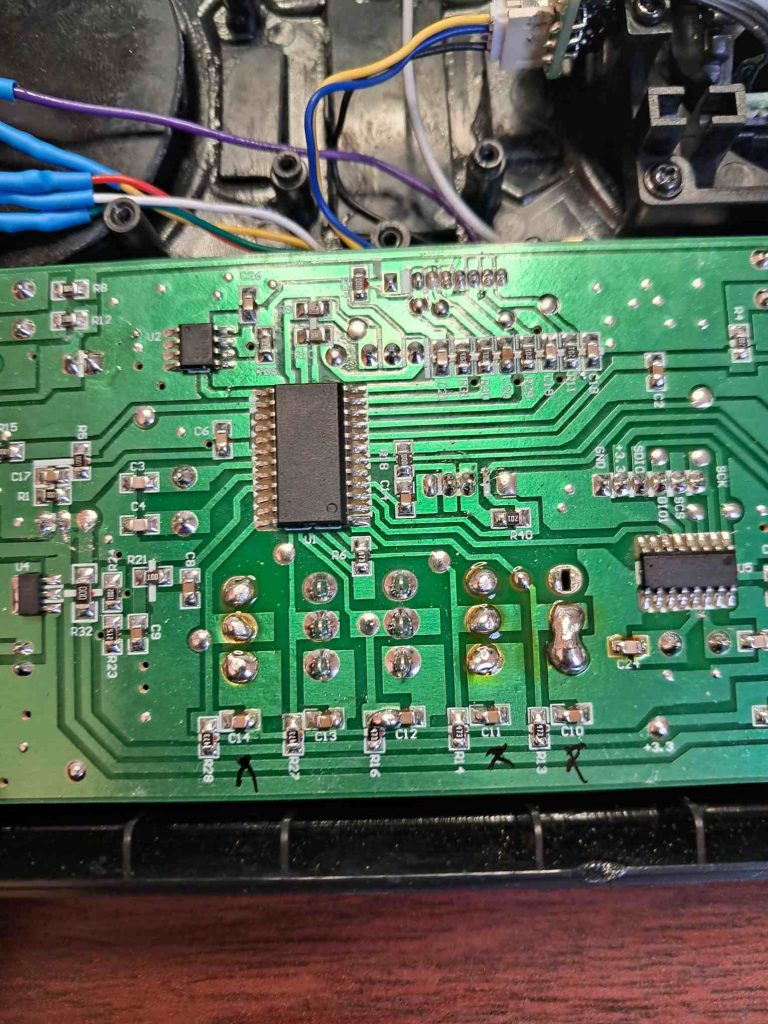
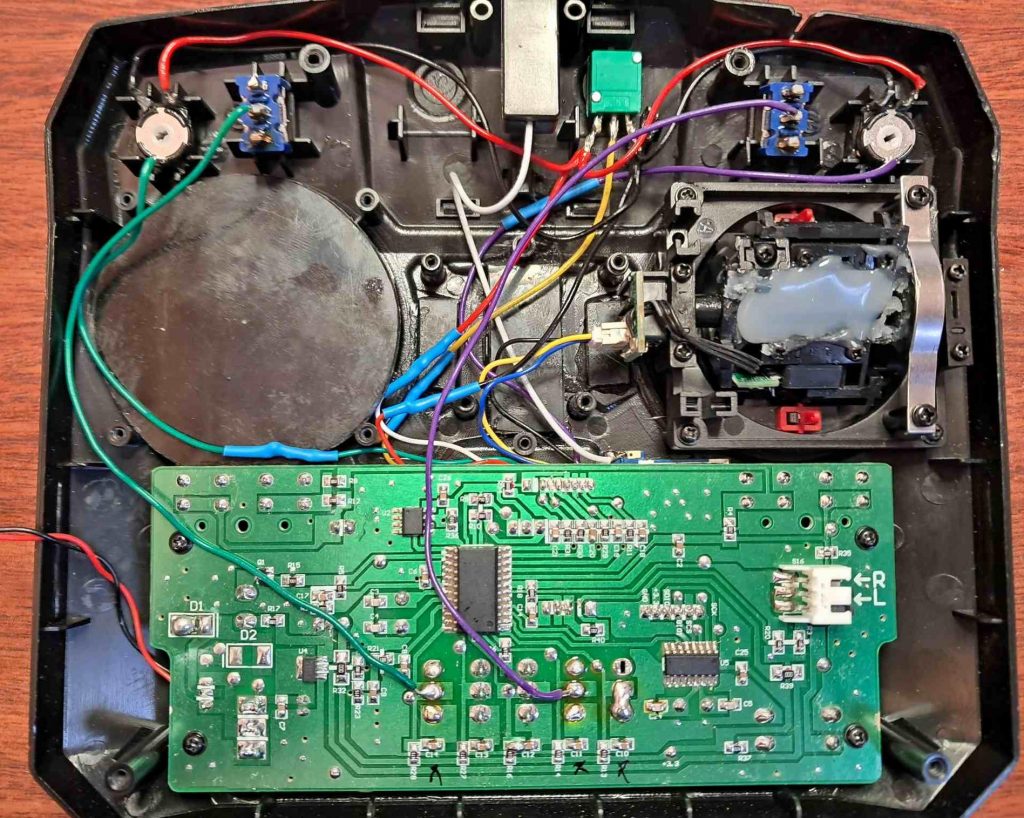
Procedemos ahora a quitar los trims de alerones y dirección, que se encuentran en la placa principal. Para ello bastará con quitar los tornillos que los anclan a ella. Quedarán sus pulsadores a la vista.
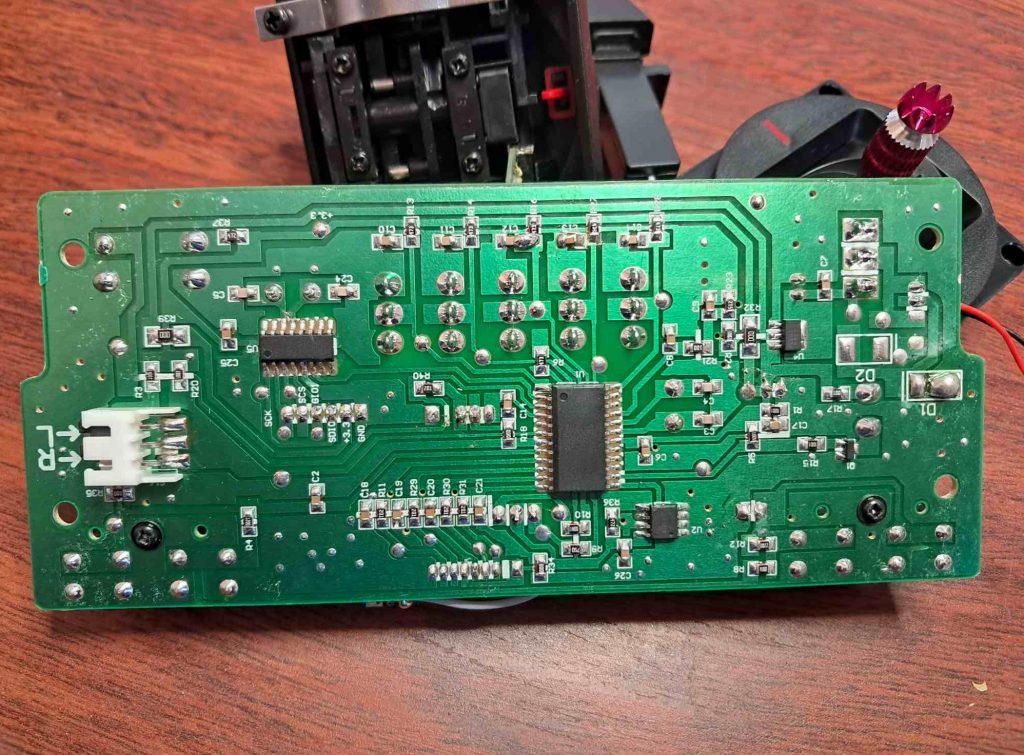
Si nos fijamos en la fotografía de la izquierda, los dos tornillos negros que se ven en el lado verde de la placa son los que sujetan los accionadores de los trims.
Quitaremos ahora el stick de alerones y profundidad, que es el que no se queda retenido y vuelve siempre al centro cuando lo soltamos. Si nos fijamos bien es el stick que NO tiene una lámina metálica que hace que el mando de gases se quede en posición.
Como puede verse hemos cortado los cables del conector del stick a ras de este. Asegúrense de NO cortar los cables en el conector de la placa porque nos dificultaría mucho el trabajo posterior.
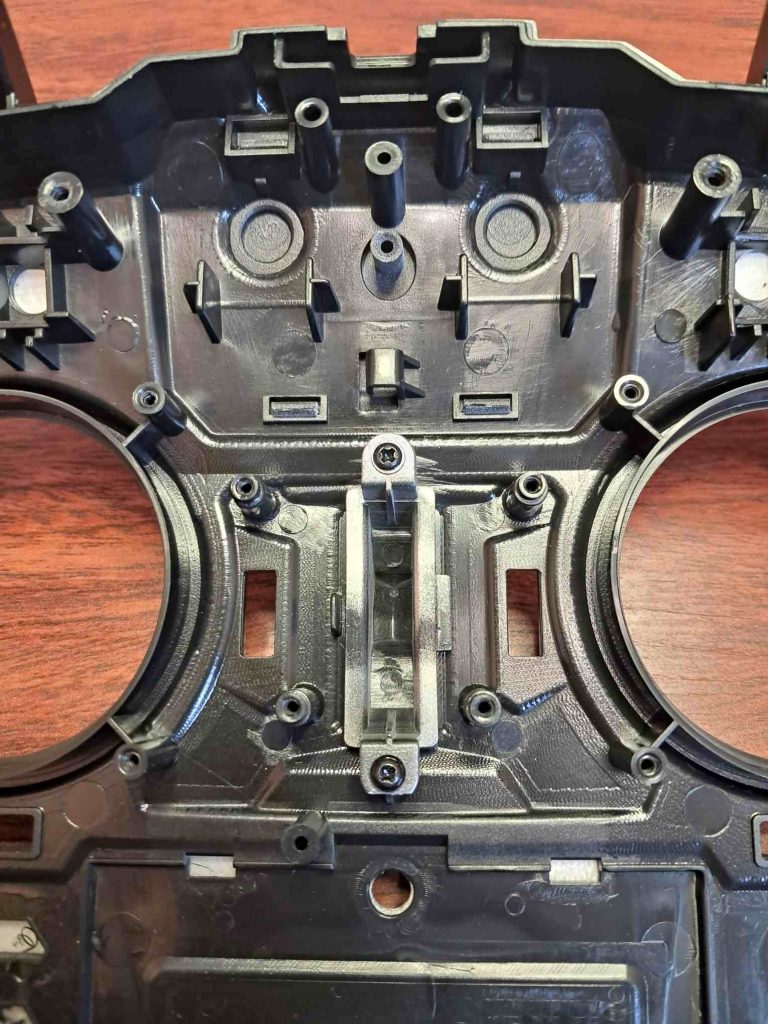
Y por último quitaremos la pieza de anclaje del arnés para colgarse la emisora, tal y como podemos apreciar en las siguientes imágenes.
Simplemente quitando los tornillos de anclaje sale la pieza.
De esta manera habremos eliminado de nuestro equipo todos los elementos que no van a ser funcionales para nuestras necesidades.
En esta entrada describiremos los trabajos de mecanizado a realizar en la adaptación de nuestro mando.
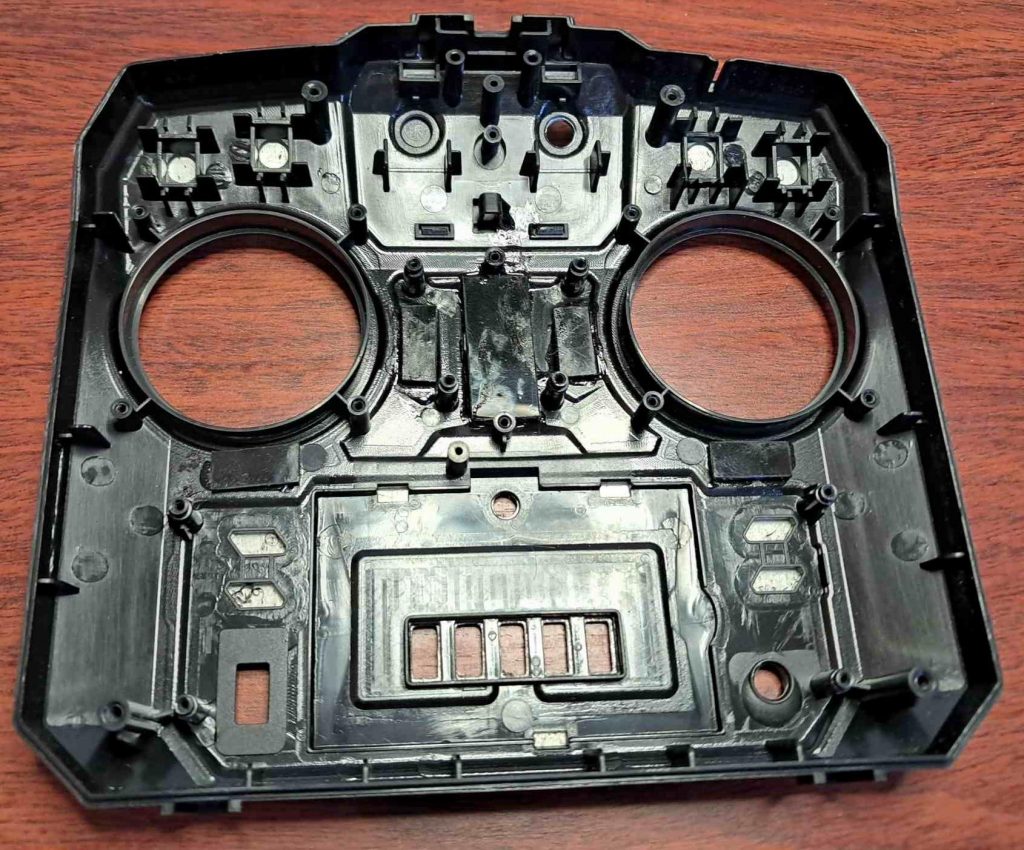
En primer lugar eliminaremos el asa de sujeción de la carcasa posterior.
Tal y como puede verse en las fotografías, cortamos el asa y lijamos la superficie resultante.
En segundo lugar eliminaremos los soportes de anclaje de la placa de conexión con un PC.
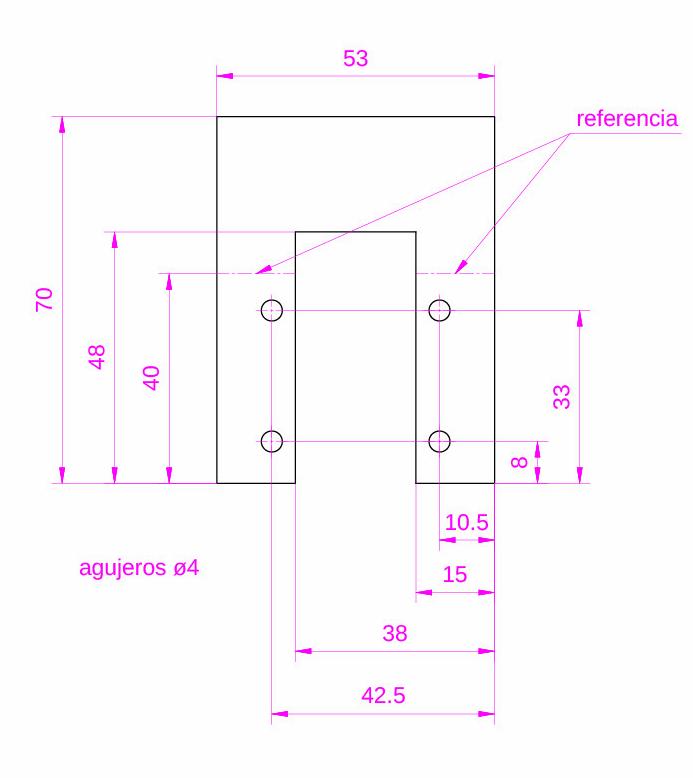
Ahora mecanizaremos los agujeros para el montaje del clip de sujeción posterior que incluiremos al final del montaje, para ello nos ayudaremos de una plantilla que fabricaremos siguiendo el plano anexo. Yo la he fabricado de policarbonato transparente de 3 mm, pero puede ser de cualquier otro material, por ejemplo de contrachapado.
TODAS LAS DIMENSIONES QUE DAREMOS EN ESTA ENTRADA SON EN MILÍMETROS
Simplemente colocamos la plantilla en posición, haciendo que las líneas marcadas como referencia coincidan con la arista indicada, marcamos la posición de los agujeros con un rotulador y taladramos a diámetro 4mm.
En este punto taparemos el agujero del conector «TRAINER», y así completaremos los trabajos de mecanizado de la carcasa posterior, para ello usaremos una placa de lámina de plástico negra de 2mm de espesor y de medida 24×18 que pegaremos con cianocrilato .
Ahora procedemos con el mecanizado de la carcasa anterior, que comenzaremos con la eliminación del asa como en la otra carcasa.
En segundo lugar mecanizaremos un agujero en la placa que tiene el nombre «FLYSKY».
Como puede verse en las fotografías superiores hemos marcado el sitio del agujero con rotulador estando la pieza colocada en su posición y después hemos hecho el agujero con la pieza quitada. Yo he hecho un agujero de 7mm y luego lo he agrandado a lima hasta el margen circular marcado.
Ahora taparemos todos los agujeros que han quedado libres al quitar las piezas que no nos sirven.
Tapamos los agujeros de los trims con cuatro plaquitas de plástico de 17×4.
Para el agujero del anclaje del arnés usaremos una placa de 35×14.
Taparemos la ventana del inversor del mando de alerones con una placa de 14×9 y las del mezclador en V y el inversor de dirección con otra de 18×14.
Y por último taparemos el agujero del stick derecho con una placa redonda de diámetro 55.
Para terminar abriremos con la ayuda de un cutter los agujeros dispuestos para canales auxiliares en la carcasa.
En este momento creo que es importante explicar lo que queremos conseguir.
Nuestro equipo de radio tiene 4 canales localizados en sus dos stick. El stick derecho tiene dos canales (alerones y profundidad), y el sitck izquierdo los otros dos (dirección y gas).
Cada canal dispone, en la parte inferior del emisor, de un interruptor de dos posiciones para invertir el sentido de giro de los servos que utilicemos.
Los sticks, cuando son accionados, mueven unos potenciómetros que, dependiendo en el punto de giro en el que se encuentren, definen el ángulo de movimiento del servo. Los potenciómetros de los sticks de nuestro equipo son de 5K ohmios.
Si nos llevamos la palanca del stick a uno de sus puntos extremos el servo correspondiente irá a una de sus posiciones extremas, y si en este punto accionamos su inversor correspondiente comprobaremos que el servo cambiará a la posición extrema opuesta. Aprovecharemos esta disposición para obtener canales todo o nada accionados por palanca, por ejemplo para accionar un tren de aterrizaje, o abrir y cerrar la cabina, o una compuerta, o soltar una bomba.
Así pues tenemos un equipo que consta de 4 juegos combinados de potenciómetro de 5K ohmios e interruptor de dos posiciones para su inversión.
De los potenciómetros originales del equipo nosotros solo vamos a utilizar el de control de gas, que mantendremos con su stick, y los otros tres los sustituiremos por unos nuevos del mismo valor, dos para las funciones todo o nada y uno para una función proporcional con un botón redondo.
Y de los interruptores originales de los inversores mantendremos dos, los de los inversores del stick y la rueda proporcional, y los otros dos los sustituiremos por unos interruptores de palanca para usarlos como canales todo o nada que trabajarán en conjunción con dos potenciómetros fijos.
Nuestro equipo también tiene un interruptor que permite hacer una mezcla, y que nosotros eliminaremos.
Pues nos ponemos manos a la obra.
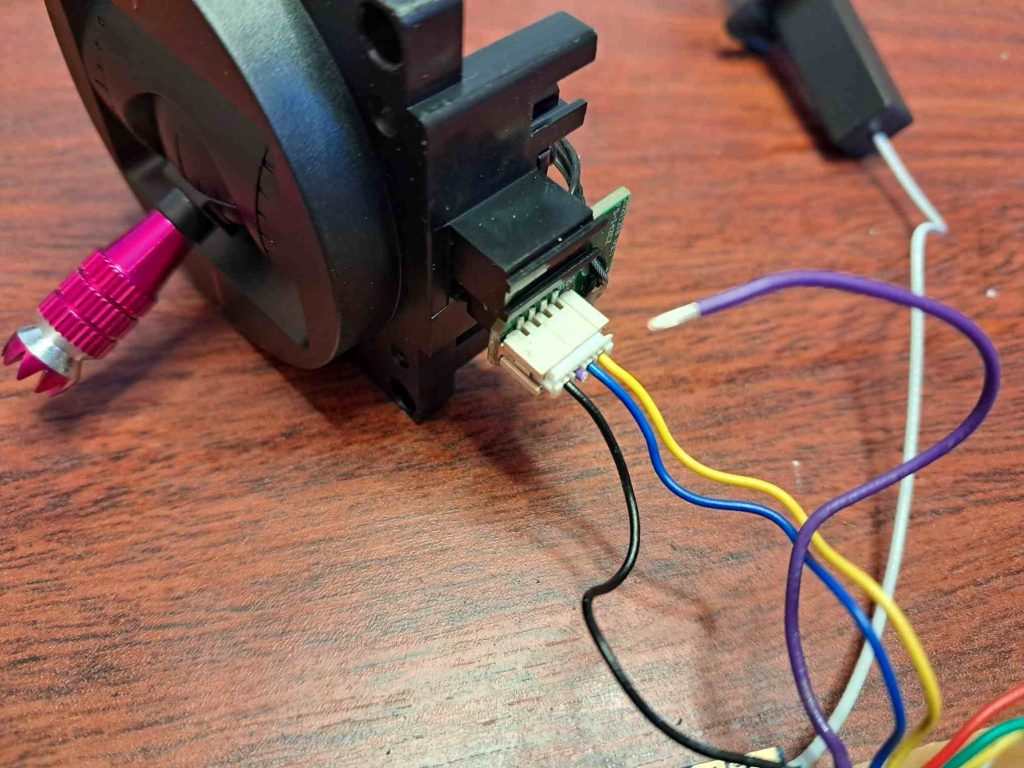
En primer lugar cortaremos el cable morado del stick que conservamos a ras del conector en dicho stick. NO CORTAR EN EL CONECTOR DE LA PLACA ELECTRÓNICA.
Ahora quitamos de la placa base los interruptores de inversión que no vamos a usar y el interruptor de mezcla. Nos quedaremos con los dos interruptores de inversión centrales, gas y profundidad, THR y ELE.
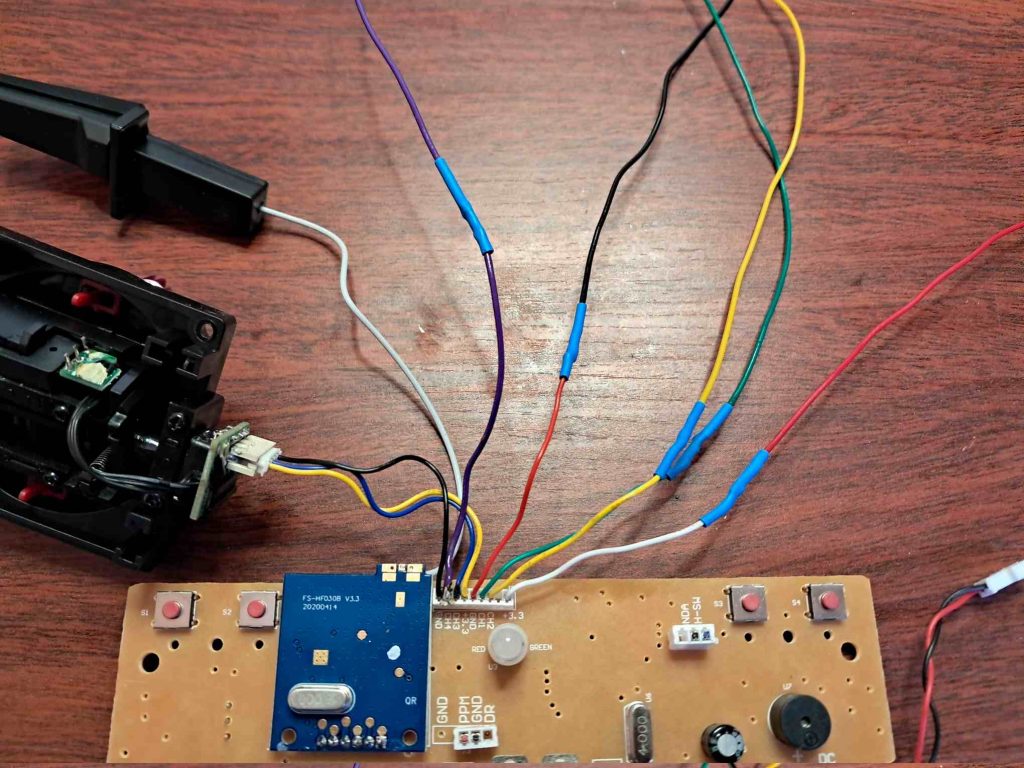
En este punto vamos a extender los cables que tenemos sin conectar, cada uno con su color, a excepción del rojo, que extenderemos con un cable negro, y el blanco, que extenderemos con un cable rojo. Estos cables son la tierra y el positivo de nuestra placa.
Es importante aislar los empalmes de los cable con funda termorretráctil para evitar problemas.
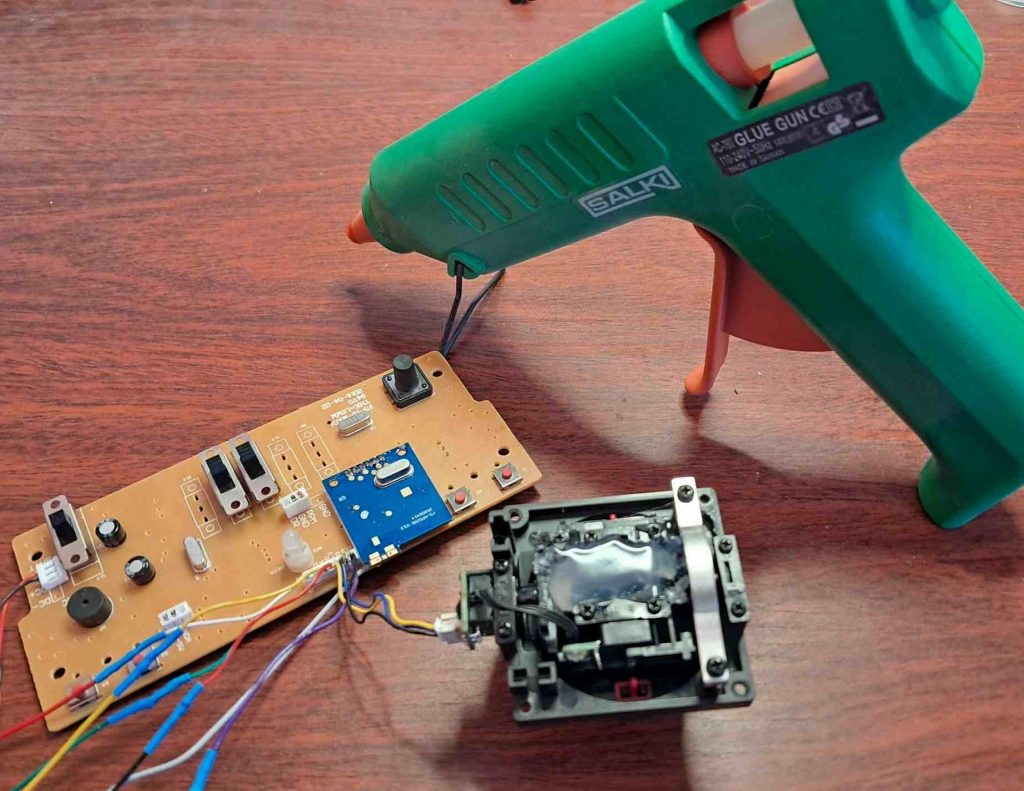
Ahora bloquearemos el stick para evitar que se mueva a los lados y solo sea funcional como mando de gas. Usaremos la pistola de cola caliente para bloquear la parte interior.
Preparamos los nuevos componentes que vamos a montar en el emisor:
Dos potenciómetros fijos tipo PIHER PT-10 de 5K, un potenciómetro con perilla tipo B5K de eje 6mm. y dos interruptores de palanca monopolares ON-ON tipo mts-102.
Yo he adquirido estos componentes en Aliexpress.
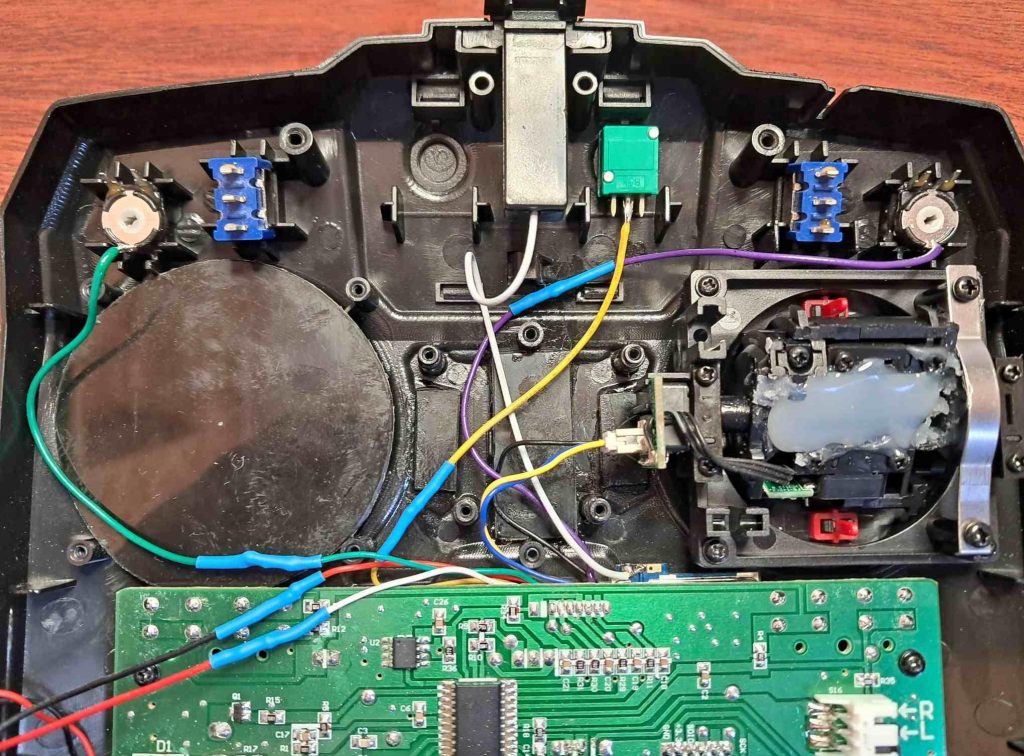
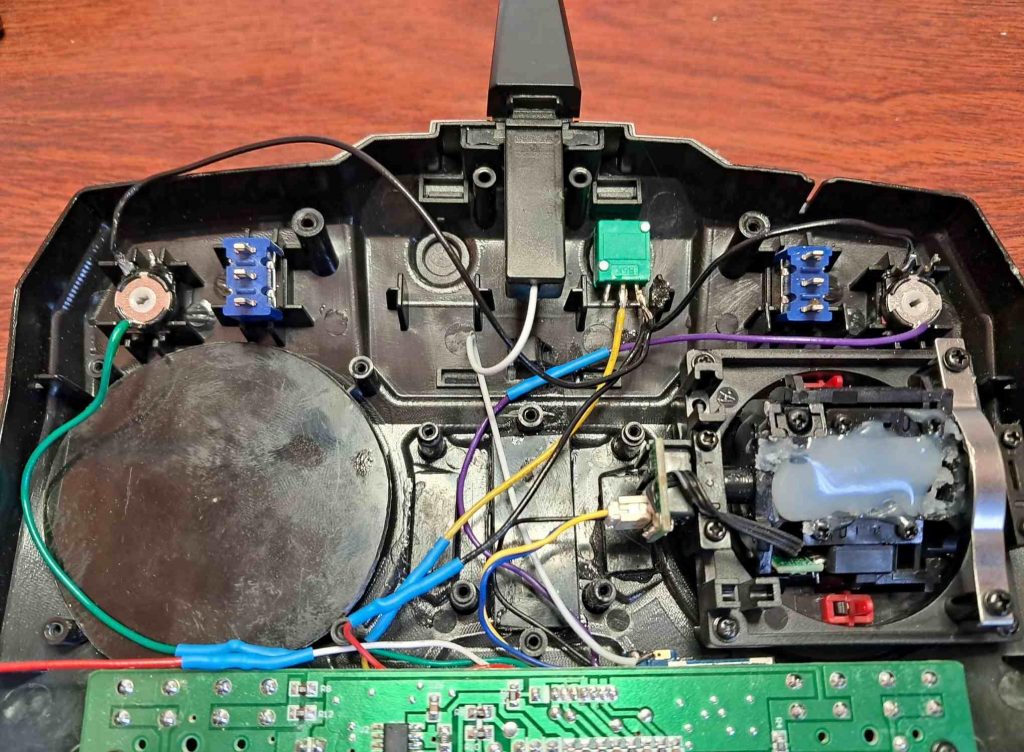
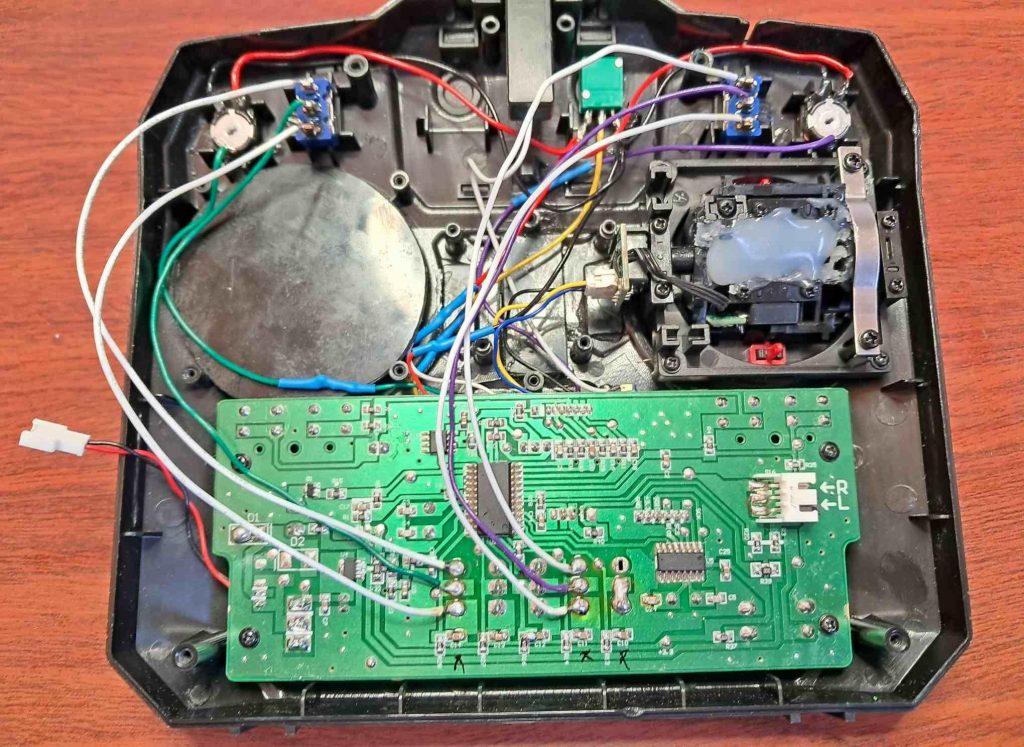
Colocamos los nuevos componentes en la carcasa anterior del emisor tal y como puede observarse. Los potenciómetros fijos se han pegado en su sitio con cianocrilato, con el lado de las dos patillas hacia arriba.
Y para terminar por hoy montamos el resto de componentes en su lugar.
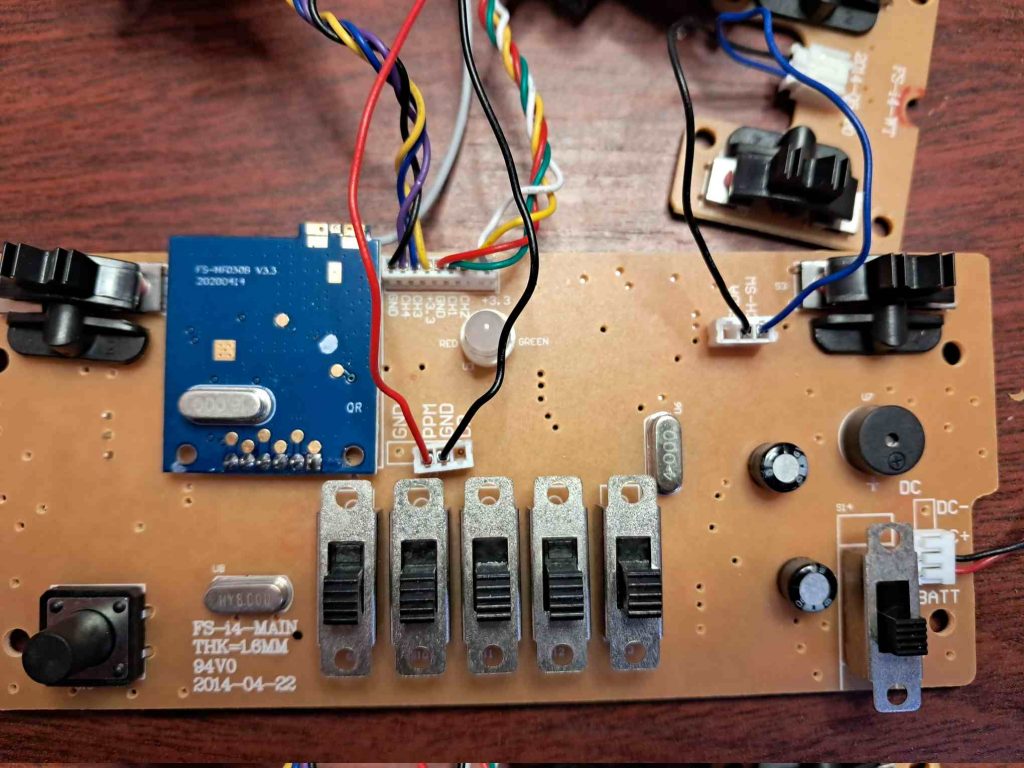
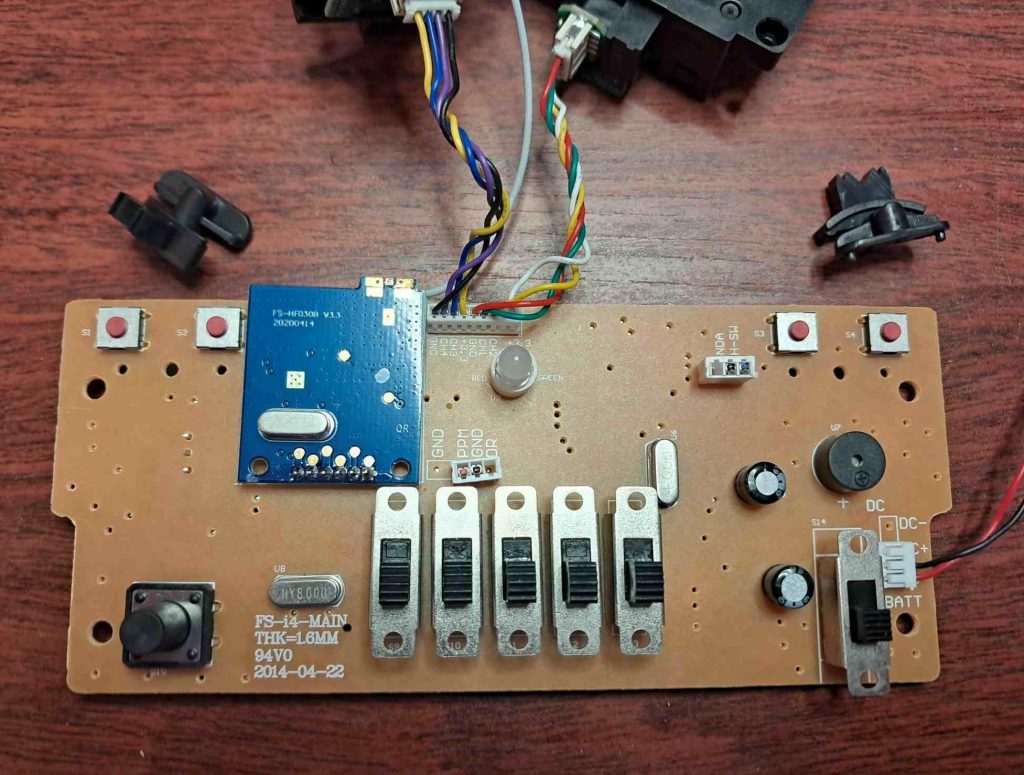
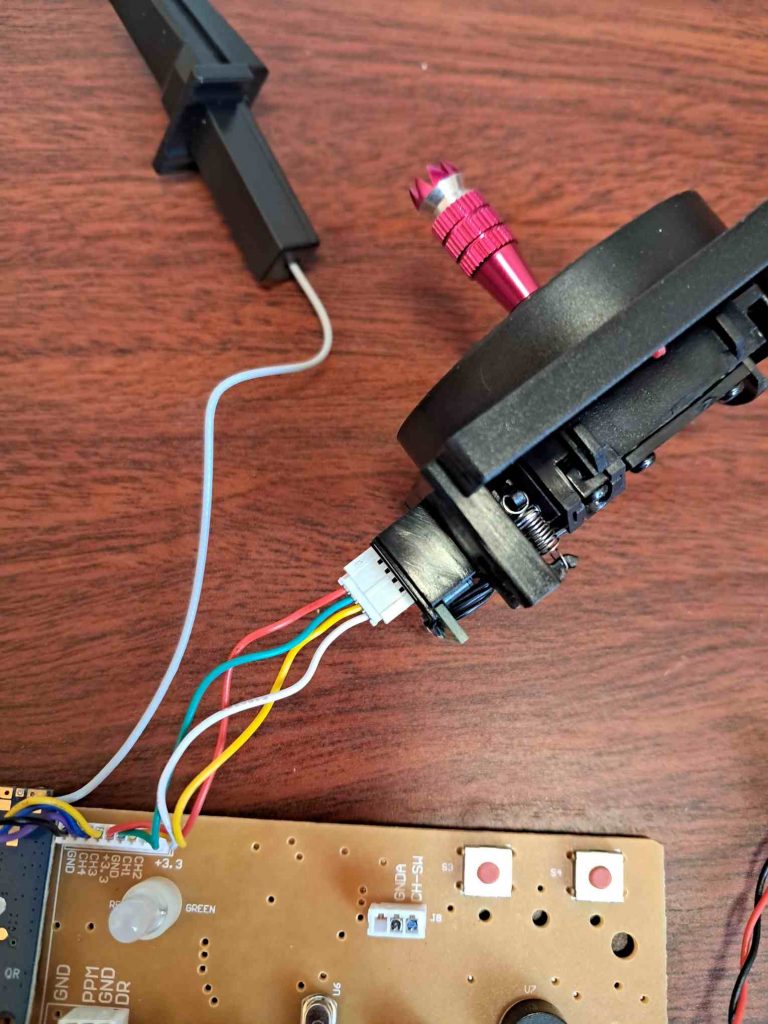
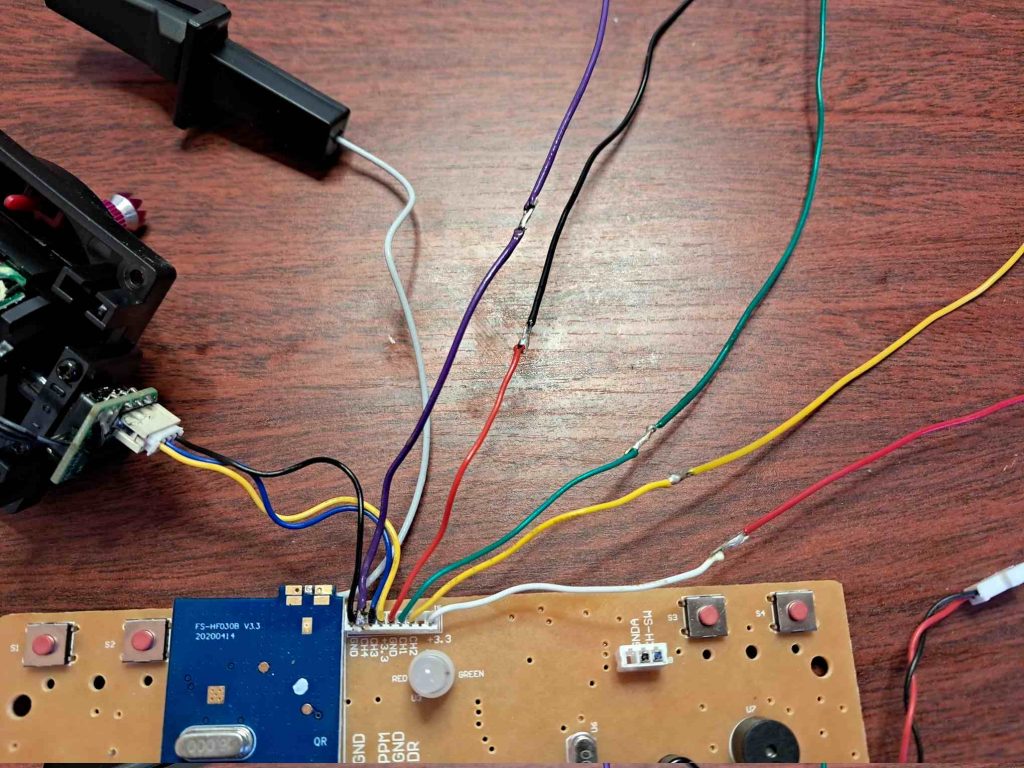
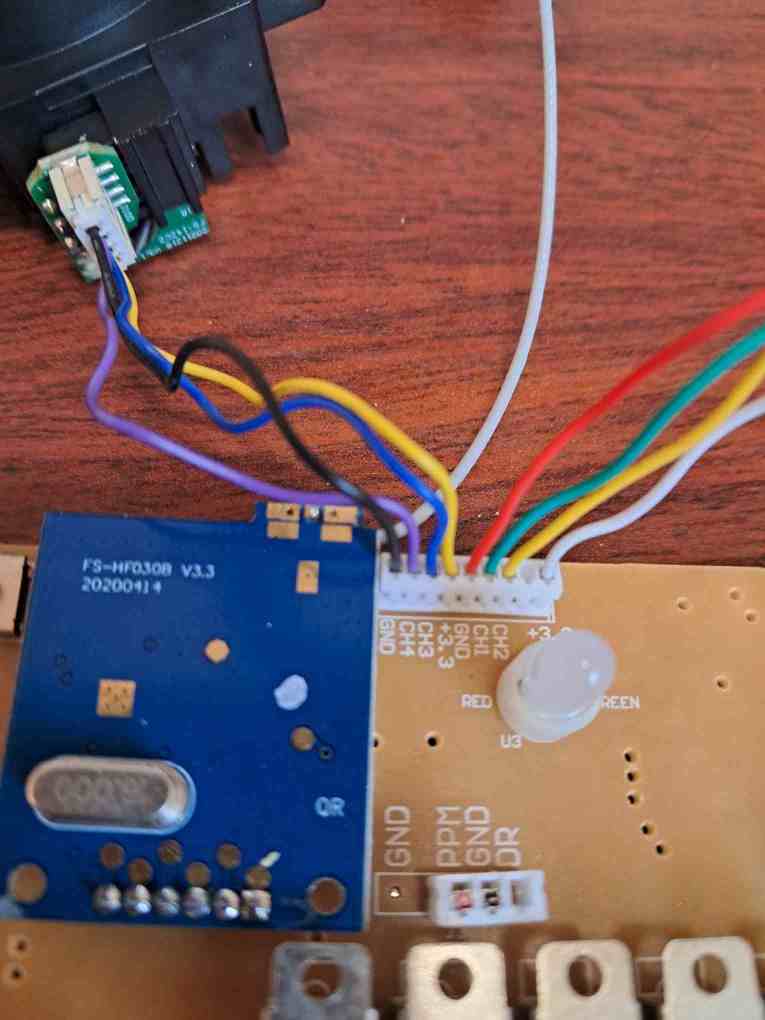
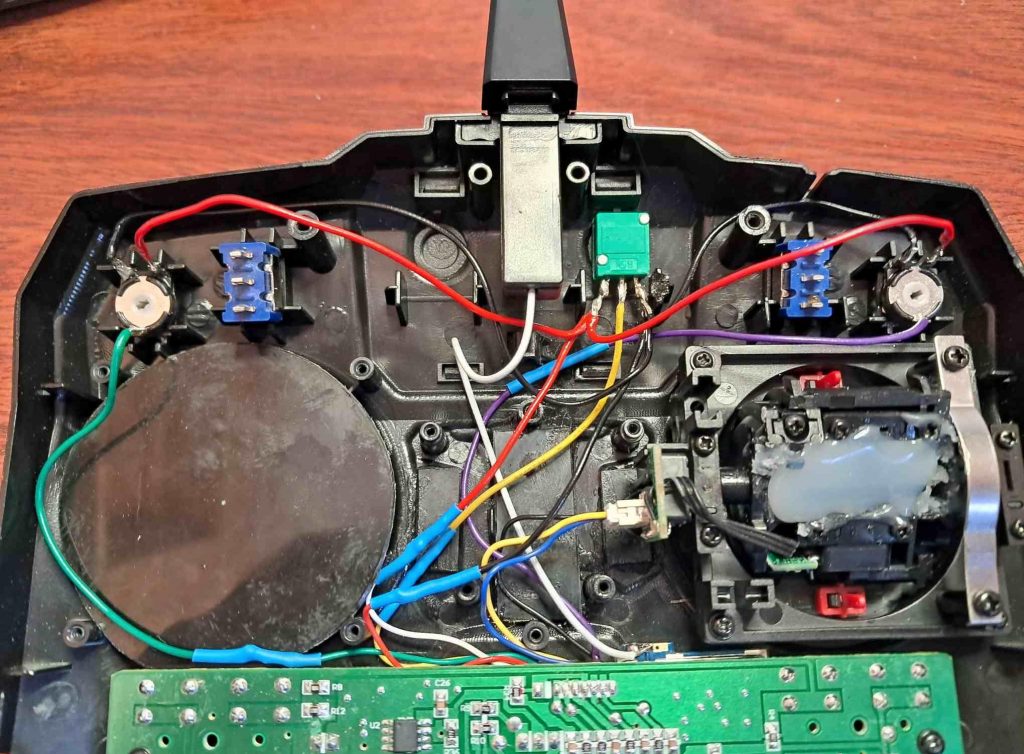
Como puede observarse en la fotografía superior la disposición de los canales de nuestro equipo es la siguiente:
CH1, cable verde, inversor AIL (alerones)
CH2, cable amarillo, inversor ELE (profundidad)
CH3, cable azul, inversor THR (gas)
CH4, cable morado, inversor RUD (dirección)
A estas alturas tenemos cortados los cuatros cables del lado derecho del conector y el cable morado. El cable rojo lo hemos extendido con un cable negro, porque es GND, tierra o negativo, y el cable blanco lo hemos extendido con un cable rojo, porque marca +3.3, lo que indica que es el polo positivo.
En primer lugar hacemos un puente con estaño entre las pistas inferiores del lugar en el que estaba el interruptor de mezcla. Con la mezcla desactivada el interruptor está abajo y estas pistas están conectadas entre sí.
Soldamos los tres cables de señal de los potenciómetros en su lugar correspondiente. La señal está conectada a la patilla central de cada potenciómetro, y las otras dos patillas son una para el polo positivo y la otra para el negativo.
Llevamos el polo negativo, cable negro, a uno de los extremos de cada potenciómetro.
Y el cable rojo al extremo de cada potenciómetro que quedaba libre.
Ahora extendemos las salidas de los inversores que eliminamos hasta nuestros interruptores de dos posiciones. Simplemente la pista de arriba va con la patilla de arriba, la central con la central y la inferior con la patilla de abajo. Yo he soldado un cable del mismo color de señal de cada potenciómetro en la patilla central simplemente con el fin de identificar cada uno de ellos. Nos queda de esta manera cada potenciómetro al lado de su correspondiente inversor.
Y para terminar conectamos el portapilas en su sitio.
Con esto terminamos el grueso de trabajo en nuestra emisora. Solo nos queda añadir el anclaje, como veremos en la siguiente entrada.
En esta última parte de nuestro tutorial para la transformación de un equipo convencional de radio control para usarlo en vuelo circular aplicaremos el refrán ese que dice que vale más una imagen que mil palabras.
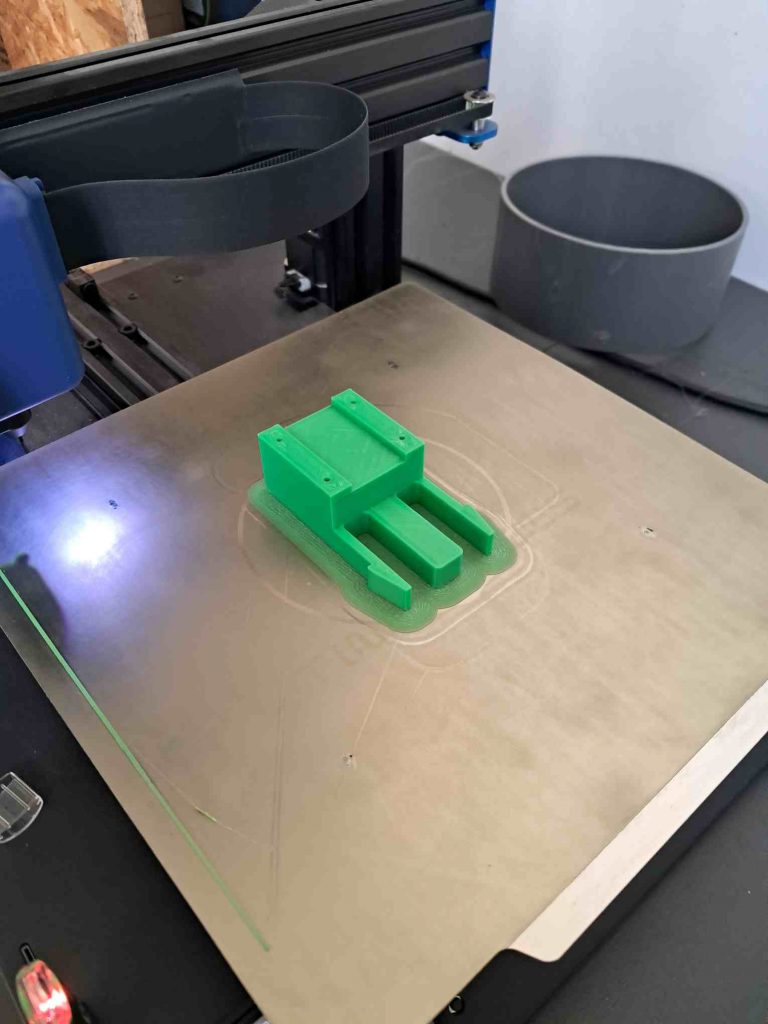
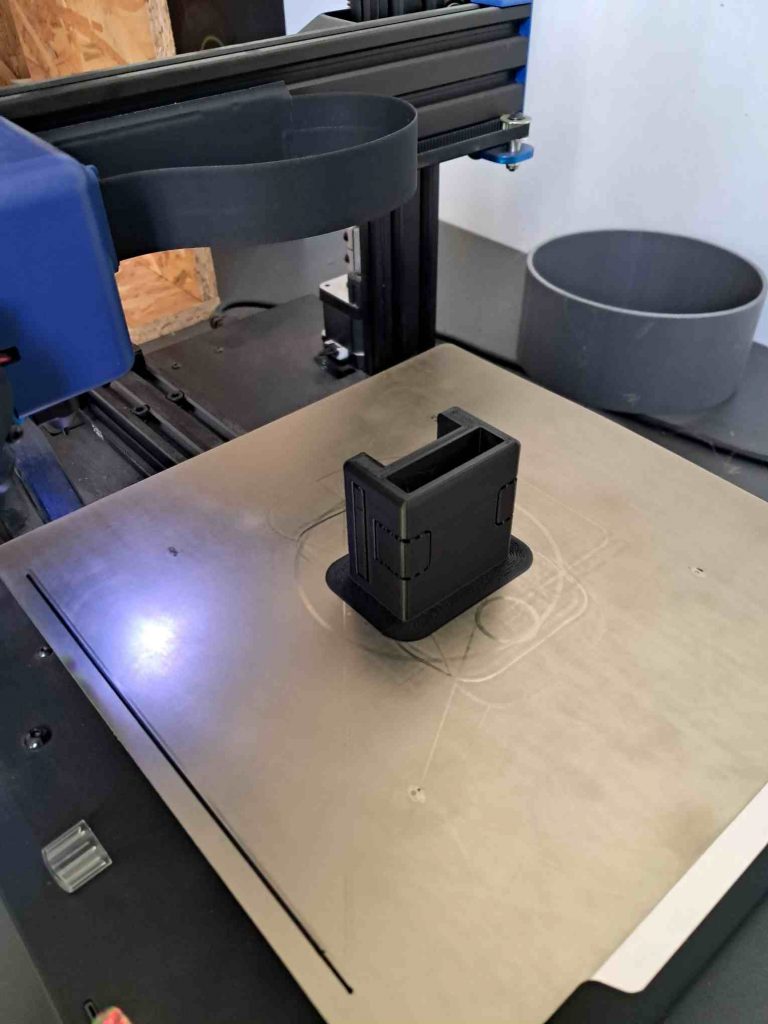
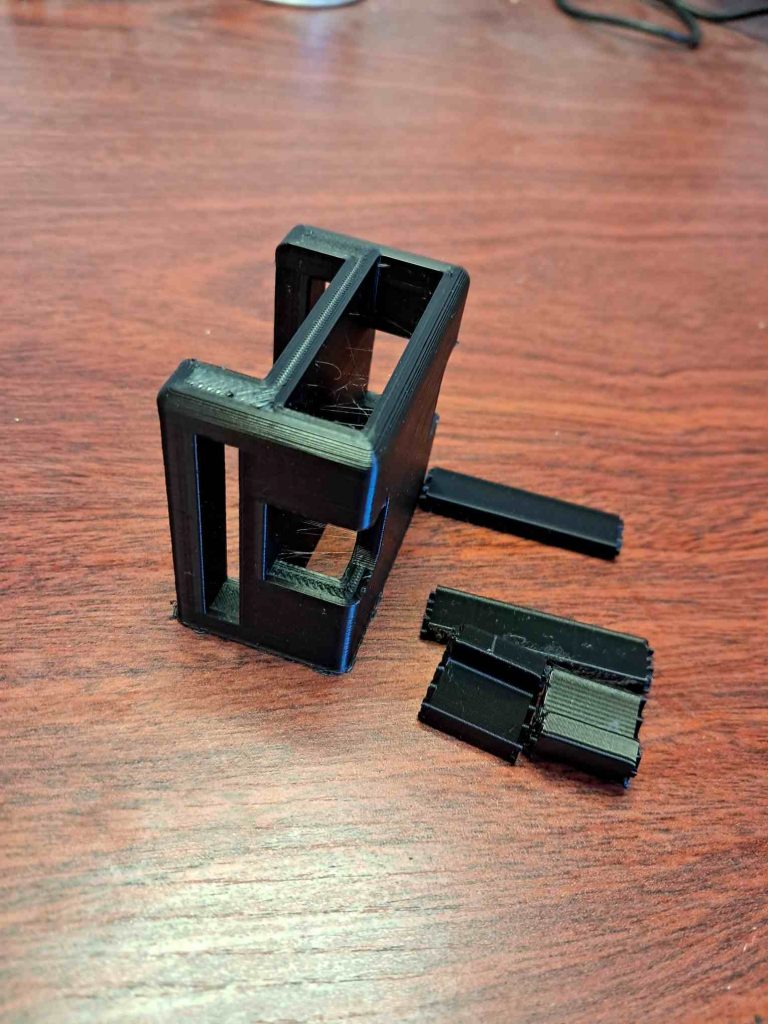
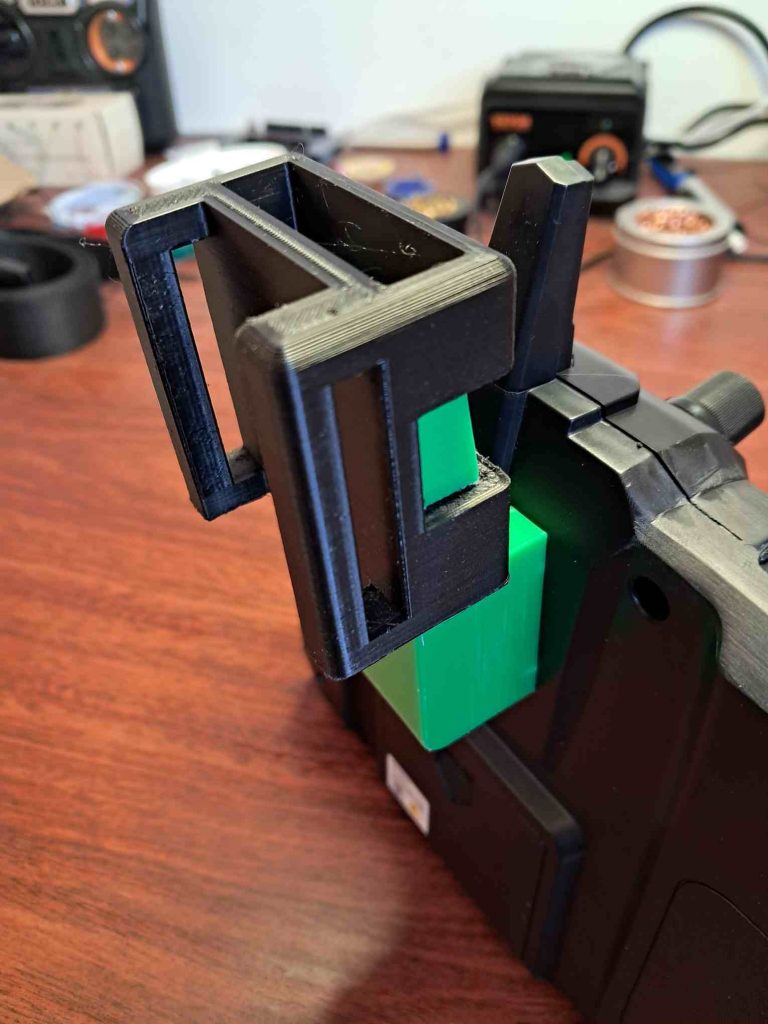
Simplemente con nuestras piezas impresas en 3D conseguimos un anclaje tipo CLIP para llevar nuestro equipo suspendido de un cinturón.
Observando las imágenes creo que sobran explicaciones. Quitamos sobrantes, lijamos un poco los bordes y montamos el soporte de color en la emisora mediante cuatro tornillos (yo uso de rosca chapa de 3.5×9.5)
Y ahí tenemos en STL los archivos de nuestras piezas para su impresión en 3D.
¡ATENCIÓN!
Es importante imprimir las piezas en la postura mostrada en las fotografías.
Si el anclaje inferior se imprime con los brazos de anclaje en vertical se partirán después de unas operaciones, porque necesitamos que las fibras de impresión estén en sentido longitudinal al brazo.
En el caso del anclaje superior es importante que la impresión tenga soportes para las zonas que quedan en voladizo.